Interface Homme - Machine
La machine n'existe pas seule. Bien souvent, elle a besoin d'être commandée par l'Homme et réciproquement, l'Homme a besoin d'interagir avec elle.
Au centre de ces échanges se trouvent deux interfaces :
le capteur :
Un capteur est un élément mesurant une grandeur physique et la traduisant en un signal manipulable par la machine (signal éléctrique le plus souvent).
Le phénomène physique peut être une température (températeure du processeur), un signal électrique (écrans tactiles), des ondes infra-rouge (mesure de distance), une distance parcourue (souris de l'ordinateur)...
l'actionneur :
Un actionneur est un dispositf traduisant un signal machine en une grandeur physique. Par exemple, un écran d'ordinateur traduit des informations sur les couleurs des pixels en lumière.
Du point de vue historique on peut retenir quelques points :
- en 1963, Ivan Sutherland crée Sketchpad (alias Robot Draftsman), un programme informatique de dessin assisté (https://www.youtube.com/watch?v=3wrn9cxlgls)
- en 1964, Douglas Engelbart invente la souris pour facilement désigner des objets sur son écran

- en 1981, Xerox sort le Xerox Star ordinateur orienté utilisateur et proposant une interface graphique, un bureau, une corbeille...
I. Au quotidien :¶
Voici le fonctionnement rudimentaire de certains de nos capteurs ou actionneurs du quotidien :
L'écran :
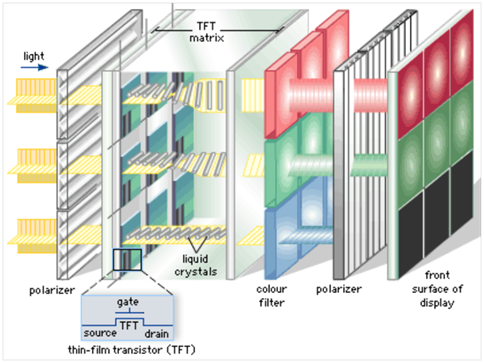
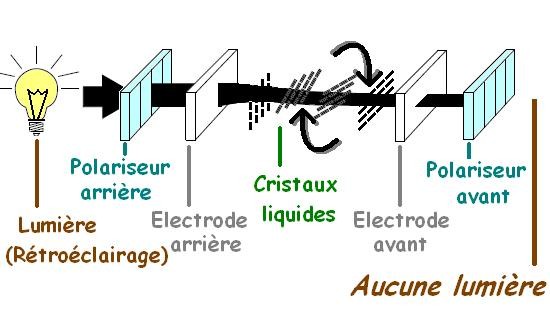
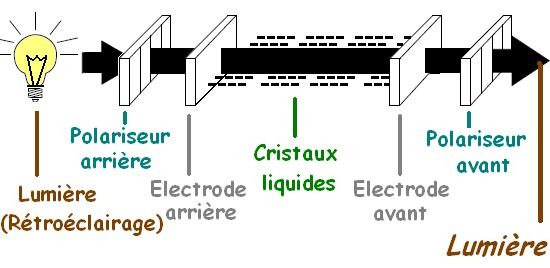
Un écran LCD par exemple utilise la polarisation de la lumière. Très simplement, cette propriété de la physique correspond à une orientation : une lumière polarisée verticalement ne pourra pas traverser un filtre horizontal et réciproquement.
Ainsi, dans un écran LCD on utilise des cristaux liquides pour modifier la polarisation de la lumière. Le contrôle des cristaux se fait à l'aide de signaux électriques. Si un signal s'applique aux cristaux, ceux-ci polarisent la lumière correctement : la lumière passe et le pixel est allumé.
Dans le cas d'un écran LED, la lumière arrière "globale" est remplacée par des petites LED individuelles. On gagne en taille (l'écran est moins épais) et en consommation mais le principe reste le même.
L'écran tactile :
Les surfaces tactiles se partagent en deux catégories : écrans résistifs ou capacitifs. Dans les deux cas, l'idée est de faire circuler du courant.
Dans les écrans résistifs, deux couches conductrices sont disposées sur l'écran. Lorsque l'on appuie, on les met en contact et le courant circule.
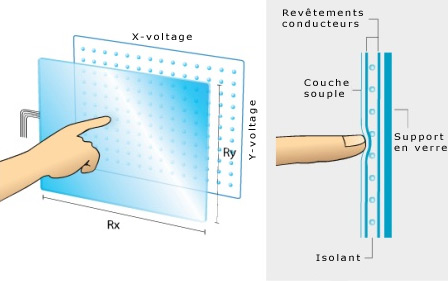
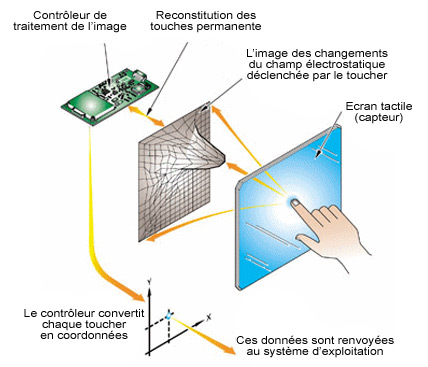
Dans les écrans capacitifs, une grille électriquement chargée recouvre l'écran. Lorsque l'on approche le doigt (et a fortiori lorsque l'on touche l'écran), on pertube les charges (une partie du courant passe dans notre corps !). Ce déficit de courant est repéré et permet de détecter l'endroit touché.
Le clavier :
Le clavier récupère les touches pressées et les envoie à l'ordinateur sous forme de scan code. Celui-ci est interpété par l'ordinateur afin d'en déduire la ouche pressée.
La détection des touches se fait plus ou moins toujours de la même façon : le courant circulant dans le clavier et bloqué par un interrupteur sous chaque touche. Lorsqu'on la presse, l'interrrupetur est fermé et le courant circule.
L'ensemble des mesures réalisées par le clavier est géré par un micro-contrôleur (voir ci-dessous).
Pour finir mentionnons le phénomène de rebond : lors de la fermeture d'un interrupteur, les deux contacteurs peuvent "rebondir" l'un sur l'autre et créer plusieurs impulsions au lieu d'une seule.
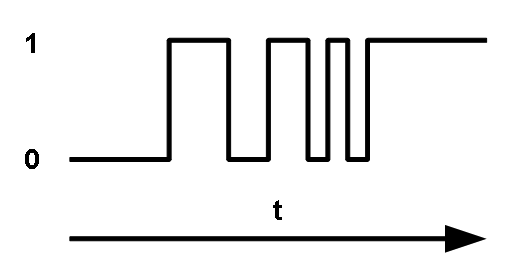
Dans le cas d'un clavier le résultat serait la détection de plusieurs appuis sur la touche au lieu d'un seul. Le clavier se doit donc de gérer ces rebonds à l'aide d'un filtrage (électrique ou logiciel).
II. Les micro-contrôleurs :¶
Un micro-contrôleur est un circuit intégré rassemblant l'ensemble des composant d'un ordinateur auxquels sont souvent ajoutés des capteurs et actionneurs.
On trouve sur le marché différents micro-contrôleurs. En voici deux exemples :
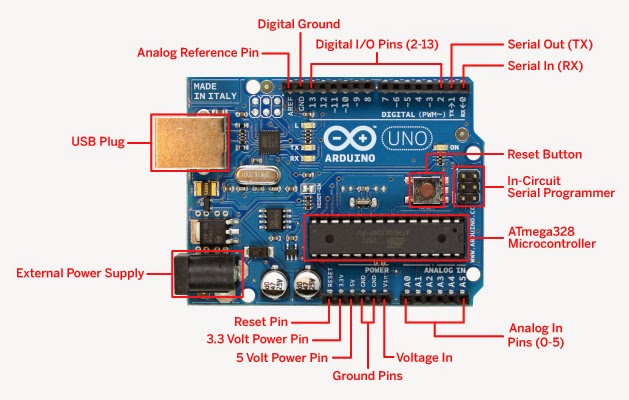
- Arduino :
- Micro:bit :
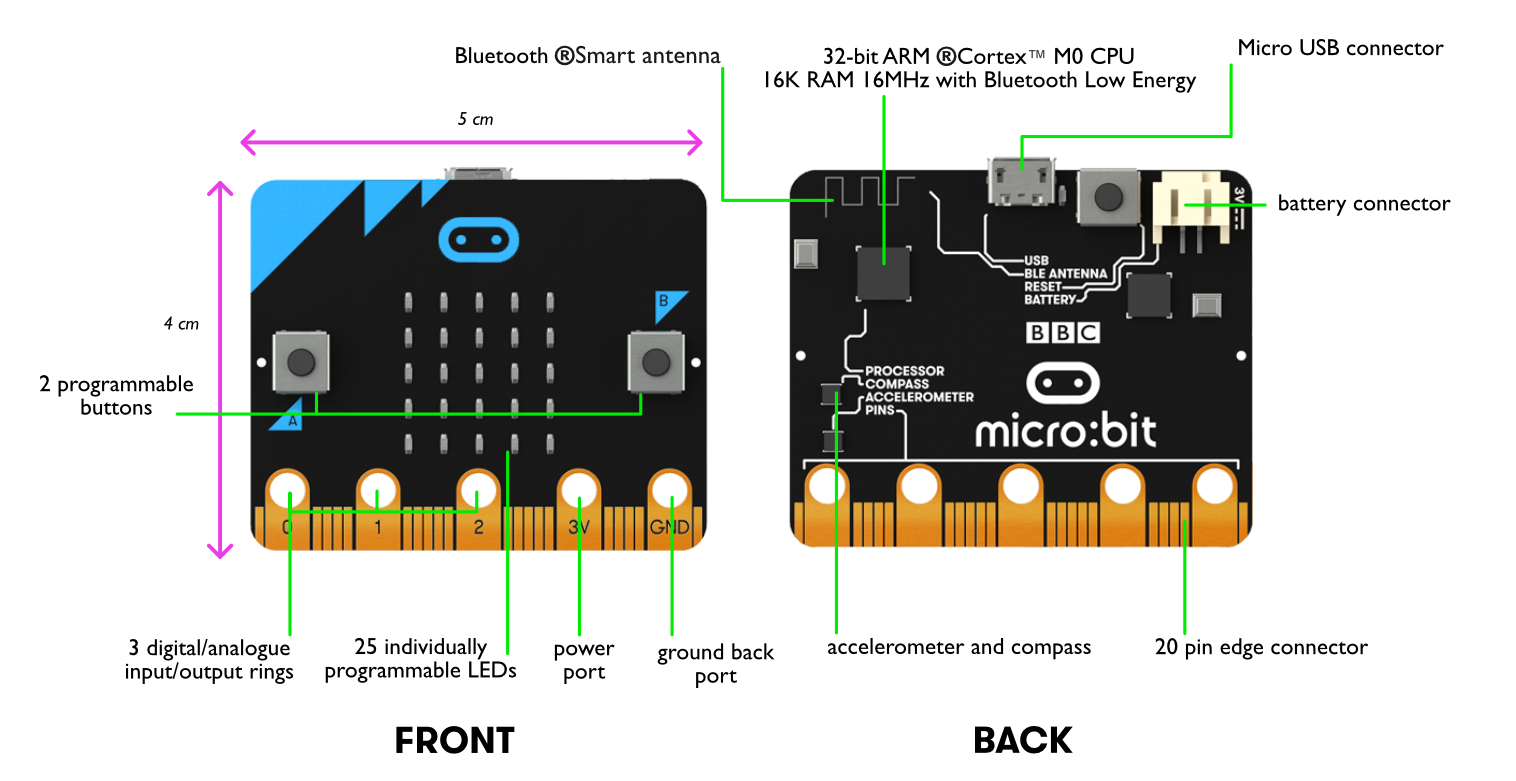
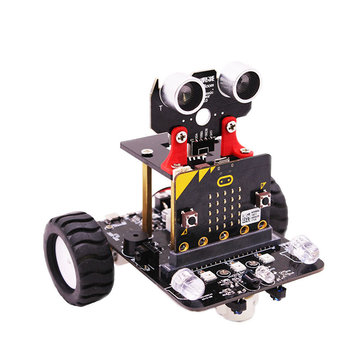
Dans les deux cas, ces cartes sont programmables à partir de l'ordinateur. On peut de plus leur ajouter différents modules afin de fabriquer des robots par exemple.
Profitons-en pour préciser un peu la notion de robot. Depuis l'antiquité, l'Homme a fabriqué des automates (pigeon volant d'Archytas, canard de Vaucansson)
Au XX-ième siècle la technologie s'améliore et l'automate, reproduisant une série d'actions pré-écrites, devient robot capable d'interagir avec son environnement.
Au passage, notons, que le mot "robot" provient de la pièce "R. U. R. (Rossum's Universal Robots)" écrite par le tchèque Karel Čapek en 1920. Le mot a été créé par son frère Josef à partir du mot tchèque "robota" qui signifie « travail, besogne, corvée ».
Aujourd'hui les robots se trouvent dans beaucoup de secteurs, la médecine, l'armée, le commerce, l'aide aux presonnes.
Robot "médecin" da Vinci

Robot Zora d'aide aux personnes âgées

En informatique on parle aussi de bots pour désigner des programmes informatiques remplissant automatiquement une tâche spécifique. On peut citer par exemple les bots des moteurs de recherche qui parcourent le web afin de référencer les pages web.